Nonblocking I/O
What really are descriptors?
The fundamental building block of all I/O in Unix is a sequence of bytes. Most programs work with an even simpler abstraction — a stream of bytes or an I/O stream.
A process references I/O streams with the help of descriptors, also known as file descriptors. Pipes, files, FIFOs, POSIX IPC’s (message queues, semaphores, shared memory), event queues are all examples of I/O streams referenced by a descriptor.
Creation and Release of Descriptors
Descriptors are either created explicitly by system calls like open, pipe, socket and so forth, or are inherited from the parent process.
Descriptors are released when:
— the process exits
— by calling the close system call
— implicitly after an exec when the descriptor is marked as close on exec.
Close-on-exec
When a process forks, all the descriptors are “duplicated” in the child process. If any of the descriptors are marked close on exec, then after the parent forks but before the child execs, the descriptors in the child marked as “close-on-exec” are closed and will no longer be available to the child process.
Data transfer happens via a read or a write system call on a descriptor.
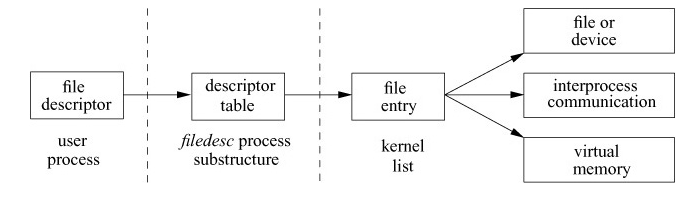
File Entry
Every descriptor points to a data structure called the file entry in the kernel. The file entry maintains a per descriptor file offset in bytes from the beginning of the file entry object. An open system call creates a new file entry.
Fork/Dup and File Entries
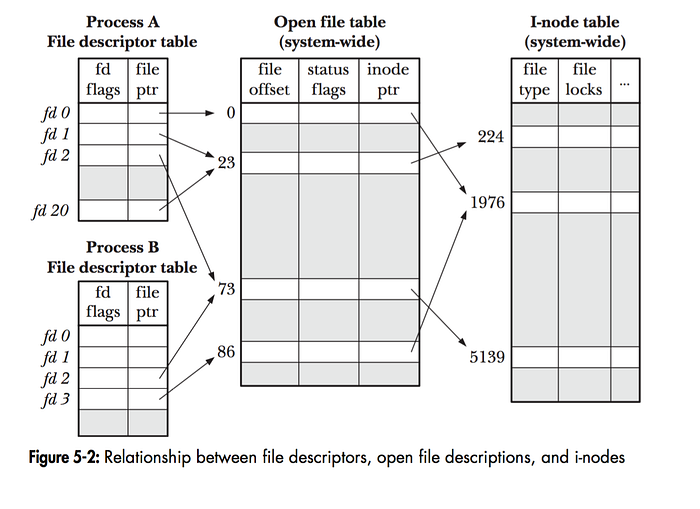
A fork system call results in descriptors being shared by the parent and child with share by reference semantics. Both the parent and the child are using the same descriptor and reference the same offset in the file entry. The same semantics apply to a dup/dup2 system call used to duplicate a file descriptor.
#include <unistd.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>int main(char *argv[]) {
int fd = open("abc.txt", O_WRONLY | O_CREAT | O_TRUNC, 0666);
fork();
write(fd, "xyz", 3);
printf("%ld\n", lseek(fd, 0, SEEK_CUR));
close(fd);
return 0;
}
which prints:
3
6More interesting is what the close-on-exec flag does, if the descriptors are only being shared. My guess is setting the flag removes the descriptor from the child’s descriptor table, so that the parent can still continue using the descriptor but the child wouldn’t be able to use it once it has exec-ed.
Offset-per-descriptor
As multiple descriptors can reference the same file entry, the file entry data structure maintains a file offset for every descriptor. Read and write operations begin at this offset and the offset itself updated after every data transfer. The offset determines the position in the file entry where the next read or write will happen. When a process terminates, the kernel reclaims all descriptors in use by the process. If the process in question was the last to reference the file entry, the kernel then deallocates that file entry.
Anatomy of a File Entry
Each file entry contains:
— the type
— an array of function pointers. This array of function pointers translates generic operations on file descriptors to file-type specific implementations.
Disambiguating this a bit further, all file descriptors expose a common generic API that indicates operations (such as read, write, changing the descriptor mode, truncating the descriptor, ioctl operations, polling and so forth) that may be performed on the descriptor.
The actual implementation of these operations vary by file type and different file types have their own custom implementation. Reads on sockets aren’t quite the same as reads on pipes, even if the higher level API exposed is the same. The open call is not a part of this list, since the implementation greatly varies for different file types. However once the file entry is created with an open call, the rest of the operations may be called using a generic API.
Most networking is done using sockets. A socket is referenced by a descriptor and acts as an endpoint for communication. Two processes can create two sockets each and establish a reliable byte stream by connecting those two end points. Once the connection has been established, the descriptors can be read from or written to using the file offsets described above. The kernel can redirect the output of one process to the input of another on another machine. The same read and write system calls are used for byte-stream type connections, but different system calls handle addressed messages like network datagrams.
Non-Blocking descriptors
By default, read on any descriptor blocks if there’s no data available. The same applies to write or send. This applies to operations on most descriptors except disk files, since writes to disk never happen directly but via the kernel buffer cache as a proxy. The only time when writes to disk happen synchronously is when the O_SYNC flag was specified when opening the disk file.
Any descriptor (pipes, FIFOs, sockets, terminals, pseudo-terminals, and some other types of devices) can be put in the nonblocking mode. When a descriptor is set in nonblocking mode, an I/O system call on that descriptor will return immediately, even if that request can’t be immediately completed (and will therefore result in the process being blocked otherwise). The return value can be either of the following:
— an error: when the operation cannot be completed at all
— a partial count: when the input or output operation can be partially completed
— the entire result: when the I/O operation could be fully completed
A descriptor is put in the nonblocking mode by setting the no-delay flag O_NONBLOCK. This is also called an “open-file” status flag (in glibc, “open-file” flags are flags that dictate the behavior of the open system call. Generally, these options don’t apply after the file is open, but O_NONBLOCK is an exception, since it is also an I/O operating mode).
Readiness of Descriptors
A descriptor is considered ready if a process can perform an I/O operation on the descriptor without blocking. For a descriptor to be considered “ready”, it doesn’t matter if the operation would actually transfer any data — all that matters is that the I/O operation can be performed without blocking.
A descriptor changes into a ready state when an I/O event happens, such as the arrival of new input or the completion of a socket connection or when space is available on a previously full socket send buffer after TCP transmits queued data to the socket peer.
There are two ways to find out about the readiness status of a descriptor — edge triggered and level-triggered.
Level Triggered
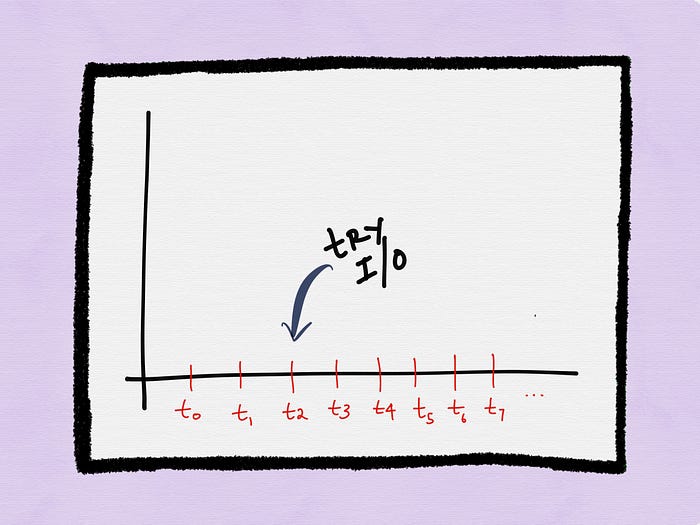
I see this as the “pull” model or the “poll” model. To determine if a descriptor is ready, the process tries to perform a non blocking I/O operation. A process may perform such operations any number of times. This allows for more flexibility with respect to the handling of any subsequent I/O operation —like for instance, if a descriptor is ready, a process could choose to either read all the data available or not perform any I/O at all or choose not to read all of the input data available in the buffer. Let’s see how this works with an example.
At time t0, a process could try an I/O operation on a non-blocking descriptor. If the I/O operation blocks, the system call returns an error.
Then at time t1, the process could try I/O on the descriptor again. Let’s say the call blocks again and an error is returned.
Then at time t2, the process tries I/O on the descriptor again. Let’s assume the call blocks yet again and an error is returned.
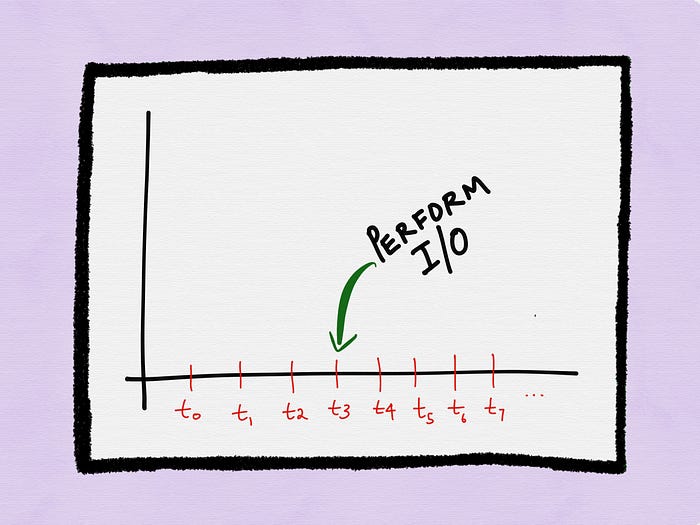
Let’s say at time t3 the process polls for the status of a descriptor and the descriptor is ready. The process can then chose to actually perform the entire I/O operation (read all the data available on the socket, for instance).
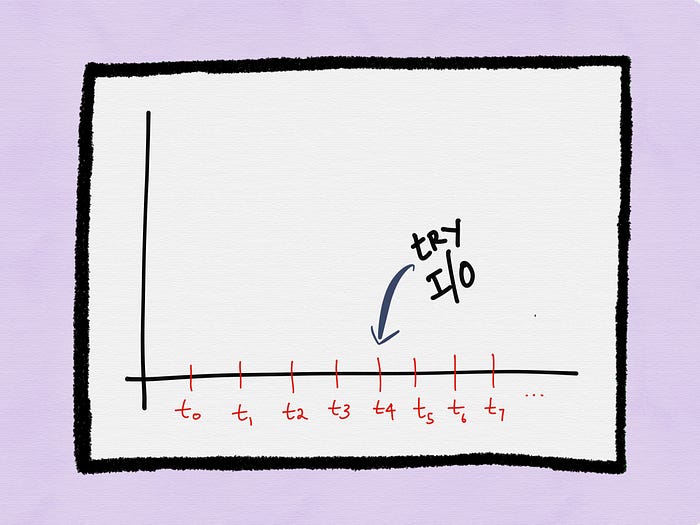
Let’s assume at time t4 the process polls for the status of a descriptor and the descriptor is not ready. The call blocks again and the I/O operation returns an error.
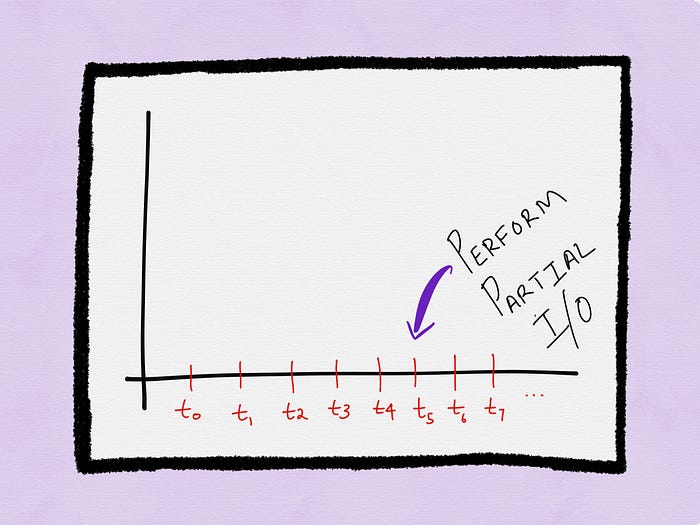
Let’s assume at time t5 the process polls for the status of a descriptor and the descriptor is ready. The process can subsequently choose to only perform a partial I/O operation (reading only half of all the data available, for instance).
Let’s assume at time t6 the process polls for the status of a descriptor and the descriptor is ready. This time the process may choose to perform no subsequent I/O at all.
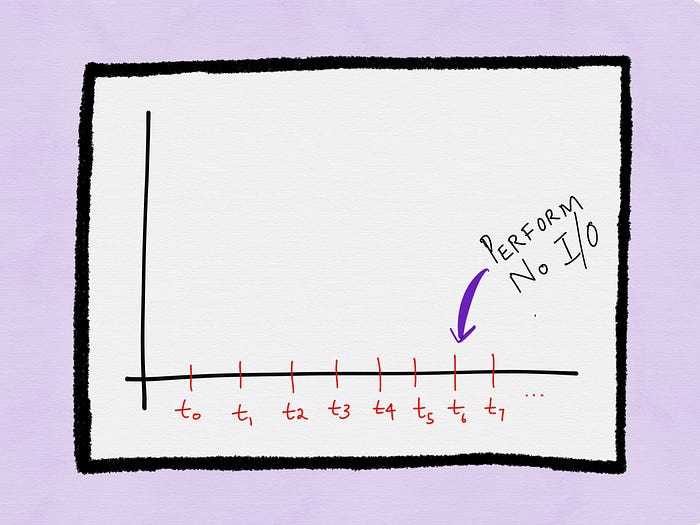
Edge Triggered
The process receives a notification only when the file descriptor is “ready” (usually when there is any new activity on the file descriptor since it was last monitored). I see this as the “push” model, in that a notification is pushed to the process about readiness of a file descriptor. Furthermore, with the push model, the process is only notified that a descriptor is ready for I/O, but not provided additional information like for instance how many bytes arrived on a socket buffer.
Thus, a process is only armed with incomplete data as it tries to perform any subsequent I/O operation. To work around this, the process can attempt to perform the maximum amount of I/O it possibly can every time it gets a descriptor readiness notification, since failing to do this would mean the process would have to wait until the next notification arrives, even if I/O is possible on a descriptor before the arrival of the next notification.
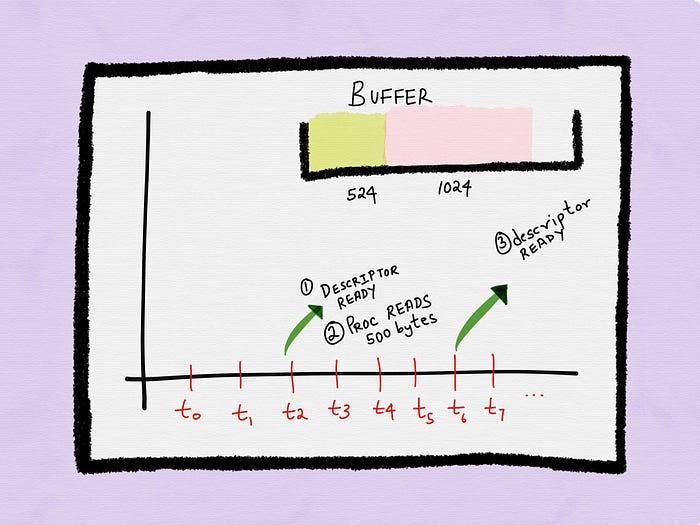
Let’s see how this works with the following example.
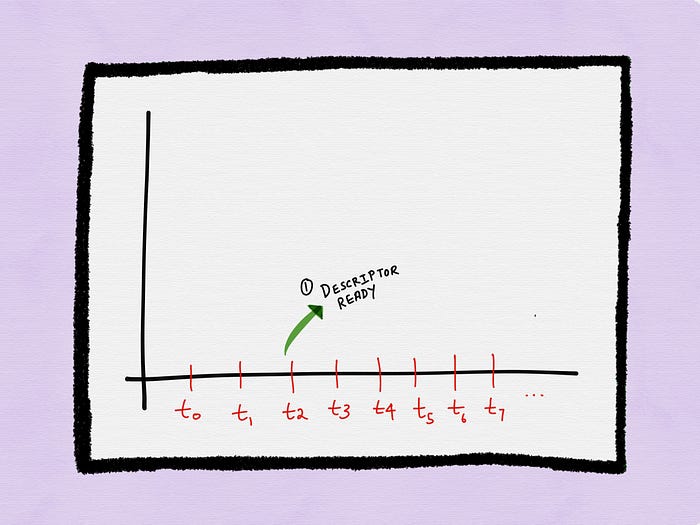
At time t2, the process gets a notification about a descriptor being ready.
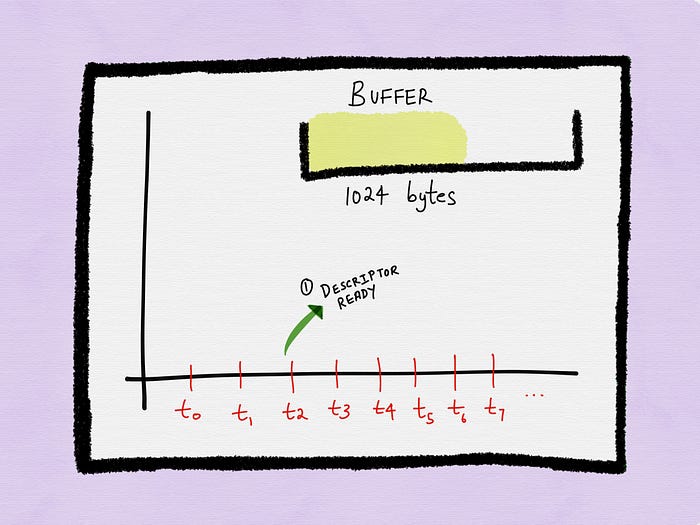
The byte stream available for I/O is stored in a buffer. Let’s assume that 1024 bytes are available for reading when the process gets the notification at time t2.
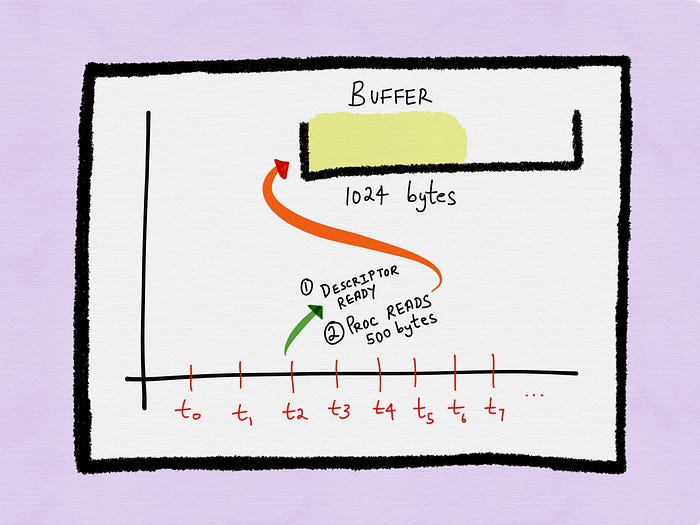
Let’s assume the process only reads 500 out of the 1024 bytes.

This means that at times t3, t4 and t5, there are still 524 bytes available in the buffer that the process can read without blocking. But since the process can only perform I/O once it gets the next notification, these 524 bytes remain sitting in the buffer for that duration.
Let’s assume the process gets the next notification at time t6, when 1024 additional bytes have arrived in the buffer. The total amount of data available on the buffer is now 1548 bytes — 524 bytes that weren’t read previously, and 1024 bytes that have newly arrived.
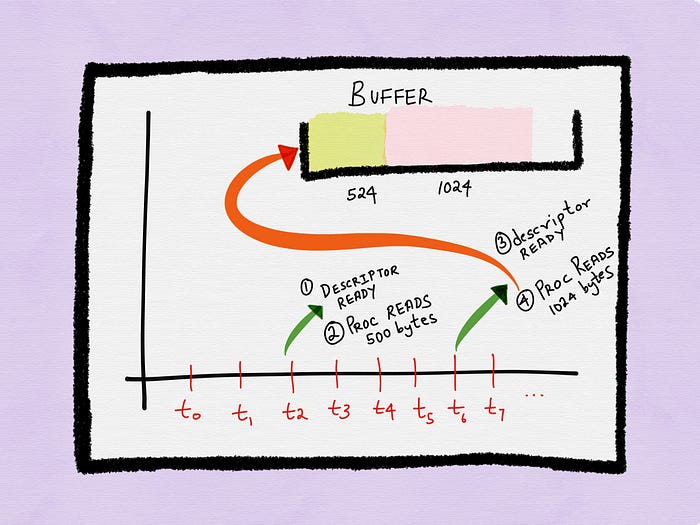
Let’s assume the process now reads in 1024 bytes.
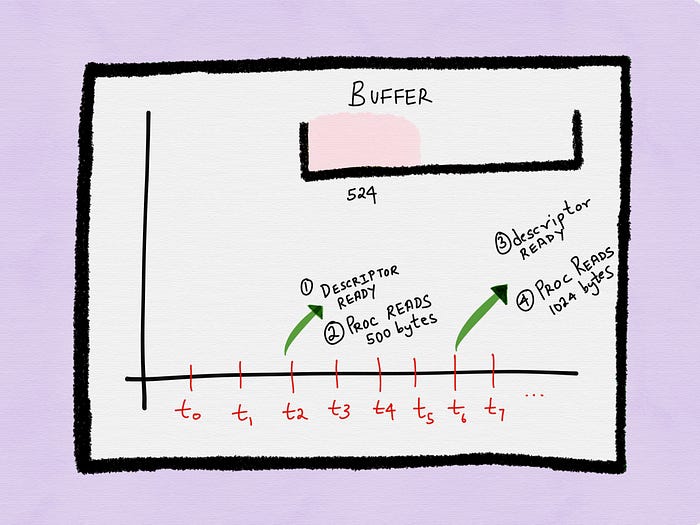
This means that at the end of the second I/O operation, 524 bytes still remain in the buffer that the process will be unable to read before the next notification arrives.
While it might be temping to perform all the I/O immediately once a notification arrives, doing so has consequences. A large I/O operation on a single descriptor has the potential to starve other descriptors. Furthermore, even with the case of level triggered notifications, an extremely large write or send call has the potential to block.
Multiplexing I/O on descriptors
In the above section, we only described how a process handles I/O on a single descriptor. Often, a process might want to handle I/O on more than one descriptor. An extremely common use case is where a program needs to log to stdout and stderr, while also accept connections on a socket and make outgoing RPC connections to other services.
There are several ways of multiplexing I/O on descriptors:
— non-blocking I/O (the descriptor itself is marked as non-blocking, operations may finish partially)
— signal driven I/O (the process owning the descriptor is notified when the I/O state of the descriptor changes)
— polling I/O (with select or poll system calls, both of which provide level triggered notifications about the readiness of descriptors)
— BSD specific kernel event polling (with the kevent system call).
Multiplexing I/O with Non-Blocking I/O
What happens to the descriptors?
When we have multiple file descriptors, we could put all of them in the non-blocking mode.
What happens in the process?
The process can try to perform the I/O operation on the descriptors to check if any of the I/O operations result in an error.
What happens in the kernel?
The kernel performs the I/O operation on the descriptor and returns an error or a partial output or the result of the I/O operation if it succeeds.
What are the cons?
Frequent checks: If a process tries to perform I/O operations very frequently, the process has to continuously be retrying operations that returned an error to check if any descriptors are ready. Such busy-waiting in a tight loop could lead to burning CPU cycles.
Infrequent checks: If such operations are conducted infrequently, then it might take a process an unacceptably long time to respond to an I/O event that is available.
When it might make sense to use this approach?
Operations on output descriptors (writes for example) don’t generally block. In such cases, it might help to try to perform the I/O operation first, and revert back to polling when the operation returns an error. It might also make sense to use this approach with edge-triggered notifications, where the descriptors can be put in nonblocking mode, and once a process gets notified of an I/O event, it can repeatedly try I/O operations until the system calls would block with an EAGAIN or EWOULDBLOCK.
Multiplexing I/O via Signal Driven I/O
What happens to the descriptors?
The kernel is instructed to send the process a signal when I/O can be performed on any of the descriptors.
What happens in the proceess?
The process will wait for signals to be delivered when any of the descriptor is ready for an I/O operation.
What happens in the kernel?
Tracks a list of descriptors and sends the process a signal every time any of the descriptors become ready for I/O.
What are the cons of this approach?
Signals are expensive to catch, rendering signal driven I/O impractical for cases where a large amount of I/O is performed.
When it might make sense to use this approach?
It is typically used for “exceptional conditions” when the cost of handling the signal is lower than that of polling constantly with select/poll/epoll or kevent. An example of an “exceptional case” is the arrival of out-of-band data on a socket or when a state change occurs on a pseudoterminal secondary connected to a master in packet mode.
Multiplexing I/O via Polling I/O
What happens to the descriptors?
The descriptors are put in a non-blocking mode.
What happens in the process?
The process uses the level triggered mechanism to ask the kernel by means of a system call (select or poll) which descriptors are capable of performing I/O. Described below is the implementation of both select and poll.
Select
The signature of select on Darwin is:
int
select(
int nfds,
fd_set *restrict readfds,
fd_set *restrict writefds,
fd_set *restrict errorfds,
struct timeval *restrict timeout
);while on Linux it is:
int
select(
int nfds,
fd_set *readfds,
fd_set *writefds,
fd_set *exceptfds,
struct timeval *timeout
);Select monitors three independent sets of descriptors:
— the readfds descriptors are monitored to see if a read will not block (when bytes become available for reading or when encountering an EOF)
— the writefds descriptors are monitored to for when a write will not block.
— the exceptfds descriptors are monitored for exceptional conditions
When select returns, the descriptors are modified in place to indicate which file descriptors actually changed status. Any of the three file descriptor sets can be set to NULL if we don’t want to monitor that particular category of events.
The final argument is a timeout value, which specifies for how long the select system call will block:
— when the timeout is set to 0, select does not block but returns immediately after polling the file descriptors
— when timeout is set to NULL, select will block “forever”. When select blocks, the kernel can put the process to sleep until select returns. Select will block until 1) one or more descriptors specified in the three sets described above are ready or 2) the call is interrupted by a signal handler
— when timeout is set to a specific value, then select will block until 1) one or more descriptors specified in the three sets described above are ready or 2) the call is interrupted by a signal handler or 3) the amount of time specified by timeout has expired
The return values of select are the following:
— if an error (EBADF or EINTR) occurred, then the return code is -1
— if the call timed out before any descriptor became ready, then the return code is 0
— if one or more file descriptors are ready, then the return code is a positive integer which indicates the total number of file descriptors in all the three sets that are ready. Each set is then individually inspected to find out which I/O event occurred.
Poll
Poll differs from select only in terms of how we specify which descriptors to track.
With select, we pass in three sets of descriptors we want to monitor for reads, writes and exceptional cases.
With poll we pass in a set of descriptors each marked with the events it specifically needs to track.
The signature of poll on Darwin is:
int poll(
struct pollfd fds[],
nfds_t nfds,
int timeout
);And on Linux it is:
int poll(
struct pollfd *fds,
nfds_t nfds,
int timeout
);The first argument to poll is an array of all the descriptors we want to monitor.

A pollfd structure contains three pieces of information:
— the ID of the descriptor to poll (let’s call this descriptor A)
— bit masks indicating what events to monitor for the given descriptor A (events)
— bit masks set by the kernel indicating the events that actually occurred on the descriptor A (revents)
The second argument is the total number of descriptors we are monitoring (the length of the array of descriptors used as the first argument, in other words).
The third timeout specifies for how long poll would block for every time it is invoked.
— when set to -1, poll blocks indefinitely until one of the descriptors listed in the first argument is ready or when a signal is caught
— when set to 0, poll does not block but returns immediately after polling to check which of the file descriptors, if any, are ready
— when set to a value greater than 0, poll blocks until timeout milliseconds or until one of the file descriptors becomes ready or until a signal is caught, whichever one is first.
The return values of poll are the following:
— if an error (EBADF or EINTR) occurred, then the return code is -1
— if the call timed out before any descriptor became ready, then the return code is 0
— if one or more file descriptors are ready, then the return code is a positive integer. This number is the total number of file descriptors in the array on which events have happened. If the number file descriptors in the array is 10, and 4 of them had events that happened, then the return value is 4. The revents field can be inspected to find out which of the events actually occurred for the file descriptor.
What happens in the kernel?
Both select and poll are stateless. Every time a select or a poll system call is made, the kernel checks every descriptor in the input array passed as the first argument for the occurrence an event and return the result to the process. This means that the cost of poll/select is O(N), where N is the number of descriptors being monitored.
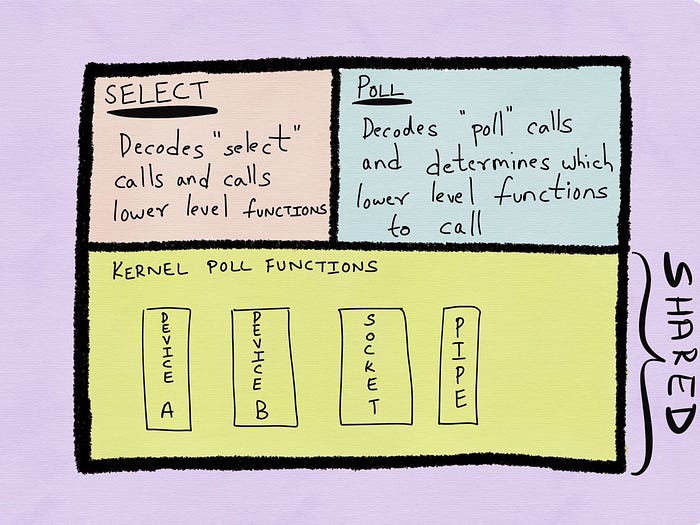
Furthermore, the implementation of both select and poll comprises of two tiers — a specific top tier which decodes the incoming request, as well as several device or socket specific bottom layers. The bottom layers compriseof kernel poll functions and is used by both select and poll.
What are the cons of this approach?
The process performs two system calls — select/poll to find out which descriptors are ready to perform I/O and another system call to do the actual operation (read/write).
Second, both select and poll only allow descriptors to be monitored for three events — reading, writing and exceptional conditions. A process might be interested in knowing about other events as well, such as signals, filesystem notifications or asynchronous I/O completions.
Furthermore, select and poll do not scale very well as the number of descriptors being monitored increases. As stated above, the cost of select/poll is O(N), which means when N is very large (think of a web server handling tens of thousands of mostly sleepy clients), every time select/poll is called, even if there might only be a small number of events that actually occurred (4, in the example above), the kernel still needs to scan every descriptor in the list (10 in the example above) and check for all the three conditions on each descriptor, and invoke the appropriate callbacks registered. This also means that once the kernel responds back to the process with the status of every descriptor, the process must then scan the entire list of descriptors in the response to determine which descriptor is ready.
When it might make sense to use this approach?
Perhaps when there the number of descriptors being monitored for I/O alone is small and these descriptors are mostly busy?
Kernel event polling on BSD
What happens to the descriptors?
The descriptors are put in non-blocking mode.
What happens in the process?
The process is provided a generic notification interface known as kevent that allows it to monitor a wide variety of events and be notified of these kernel event activities in a scalable manner. For example, the process can track:
— changes to file attributes when a file is renamed or deleted
— posting of signals to it when it forks, execs or exits
— asynchronous I/O completion
The kernel only returns a list of the events that have occurred, instead of returning the status of every event the process has registered. The kernel builds the event notification structure just once and the process is notified every time one of the events occur. If a process is tracking N events, and only a small number of those events have occurred (M), the cost is O(M) as opposed to O(N). Thus kevent scales well when only a small subset of events out of all the events the process is interested in occurs. In other words, this is especially good when there are a large number of sleepy clients or slow clients, since the number of events a process needs to be notified remains small, even if the number of events the process is monitoring is large.
The system call used to create a descriptor to use as a handle on which kevents can be registered is kqueue on BSD/Darwin. This descriptor is the means by which the process then gets the notification about the occurrence of events that it registered. This descriptor is also the means by which a process can add or delete events it wishes to be notified about.
What happens in the kernel?
The process subscribes to specific events on descriptors. The kernel provides a system call a process can invoke to find out which events have occurred. If the kernel has a list of events that have occurred, the system call returns. If not, the process is put to sleep until an event occurs.
Async I/O in POSIX
POSIX defines a specification for “parallel I/O”, by allowing a process to instantiate I/O operations without having to block or wait for any to complete. The I/O operation is queued to a file and the process is later notified when the operation is complete, at which point the process can retrieve the results of the I/O.
Linux exposes functions such as io_setup, io_submit, io_getevents, io_destroy, which allow for submission of I/O requests from a thread without blocking the thread. This is for disk I/O (especially random IO on SSD). Especially interesting is how the addition of eventfd support makes it possible to use it with epoll. Here’s a good description of how this works.
On Linux, another way of performing parallel I/O is using the threads based implementation is available within glibc:
These functions are part of the library with realtime functions named librt. They are not actually part of the libc binary. The implementation of these functions can be done using support in the kernel (if available) or using an implementation based on threads at user level. In the latter case it might be necessary to link applications with the thread library libpthread in addition to librt.
This approach, however, is not without its cons:
This has a number of limitations, most notably that maintaining multiple threads to perform I/O operations is expensive and scales poorly. Work has been in progress for some time on a kernel state-machine-based implementation of asynchronous I/O (see io_submit(2), io_setup(2), io_cancel(2), io_destroy(2), io_getevents(2)), but this implementation hasn’t yet matured to the point where the POSIX AIO implementation can be completely reimplemented using the kernel system calls.
On FreeBSD, POSIX AIO is implemented with the aio system call. An async “kernel process” (also called “kernel I/O daemon” or “AIO daemon”) performs the queued I/O operations.
AIO daemons are grouped into configurable pools. Each pool will add or remove AIO daemons based on load. One pool of AIO daemons is used to service asynchronous I/O requests for sockets. A second pool of AIO daemons is used to service all other asynchronous I/O requests except for I/O requests to raw disks.
To perform an asynchronous I/O operation:
— the kernel creates an async I/O request structure with all the information needed to perform the operation
— if the request cannot be satisfied by the kernel buffers immediately, this request structured is queued
— If an AIO daemon isn’t available at the time of request creation, the request structure is queued for processing and the syscall returns.
— the next available AIO daemon handles the request using the kernel’s sync path
— when the daemon finishes the I/O, the request structure is marked as finished along with a return or error code.
— the process uses the aio_error syscall to poll if the I/O is complete. This call is implemented by inspecting the status of the async I/O request structure created by the kernel
— if a process gets to the point where it cannot proceed until I/O is complete, then it can use the aio_suspend system call to wait until the I/O is complete.
— the process is put to sleep on the AIO request structure and is awakened by the AIO daemon when I/O completes or the process requests a signal be sent when the I/O is done
— once aio_suspend, aio_error or a signal indicating the I/O completion has arrived, using the aio_return system call gets the return value of the I/O operation.
Conclusion
This post only shed light on the forms on I/O possible and didn’t touch on epoll at all, which is by far the most interesting of all in my opinion. What’s often more interesting is buffer and memory management. My next post explores epoll in much greater detail.
